北航微型仿昆虫机器人研制
客户名称:北京航空航天大学
场地尺寸:2m x 2m
关键词:微型机器人、仿生机器人、机器人姿态、路径规划、自适应控制
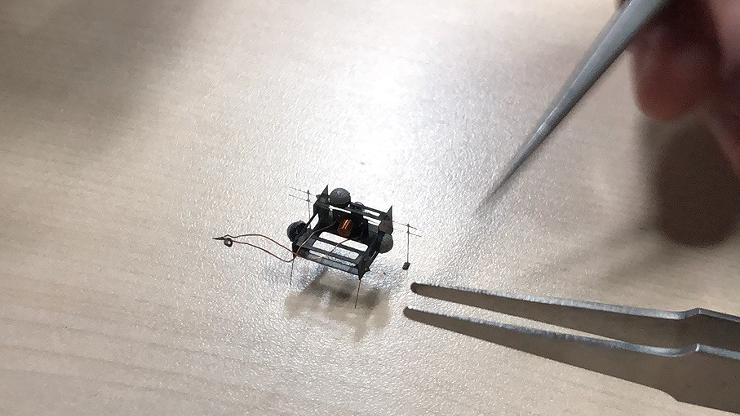
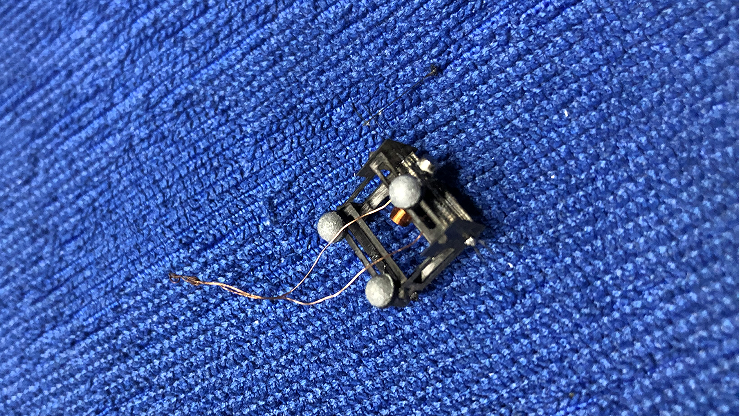
目标物:微型仿昆虫机器人
系统配置:8台Prime 41运动捕捉相机
项目描述:为解决地震等自然灾害造成的灾后救援困难,全球科研领域围绕四足仿生机器人开展大量的研究和实践,目前国内已实现四足仿生机器人在复杂地形环境的稳定控制。未来的环境勘测、灾后救援乃至军事行动,对仿生机器人的要求趋于智能化、微型化、集群化。北航的研究者们把目光聚焦在微型仿昆虫机器人上,为了准确采集微型仿昆虫机器人的位姿,凌云光解决方案工程师搭建2m x 2m的紧凑空间,采用8台400万像素的动捕相机捕捉约1cm x 1cm大小的机器人。由于机器人尺寸非常小,因此定制了3mm直径的反光标记点贴在机器人“背部”,得益于动捕相机400万像素的分辨率和识别算法,精确地捕获机器人的运动位姿信息。