机器人/飞行器实时定位
机器人/飞行器实时定位解决方案是一套集合多台高精度光学运动捕捉摄像机、运动捕捉软件和相关配件的大空间定位方案。
该方案以每秒上百帧的拍摄速率捕捉机器人/飞行器上固定的特制标记点,能够实时精确地构建出机器人/飞行器的三维空间位置信息,实现其运动轨迹的实时跟踪定位。
解决方案
1、支持任意空间内智能体集群追踪
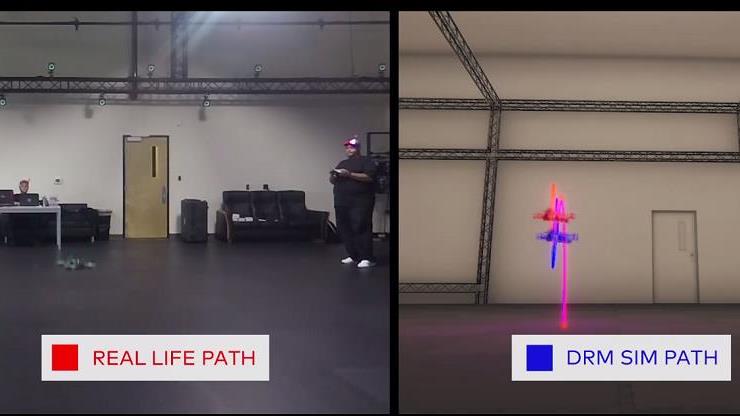
2、为Slam系统提供高精度的Ground Truth
3、为智能体自主控制系统提供稳定可靠的数据来源
4、支持基于SDK二次开发
FZMotion光学运动捕捉提供数据类型
- 提供目标智能体(任意部位)的三维位置、姿态等数据
- 提供偏航角(Yaw)/翻滚角(Roll)/俯仰角(Pitch)/四元数/欧拉角等数据
- 提供运动速度/加速度/角速度/角加速度等基础运动信息
- 提供人体/动捕/机器人的关节角度信息
- 提供目标智能体动态追踪质量的实时显示和输出
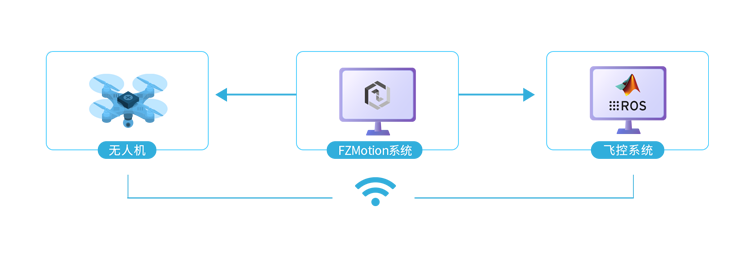
- 提供VRPN/ZMQ/TCP /UDP等传输协议
- 提供ROS/Matlab/LabView等软件数据接口

应用场景
- 无人机动作规划与动作控制
- 集群编队、自主避障与跟随
- 机器人运动、步态和位姿规划与控制
- 机械臂、智能车运动捕捉
- 教学实训室建设