北理工石青团队SQuRo仿生机器鼠研制
客户:北京理工大学机电学院智能机器人研究所
场地尺寸:2m x 2m x 1.5m
关键词:微型仿生机器人、仿生机器鼠、动力学分析、高精度
目标物:仿生机器鼠
技术方案:仿生体动作捕捉系统
项目描述:
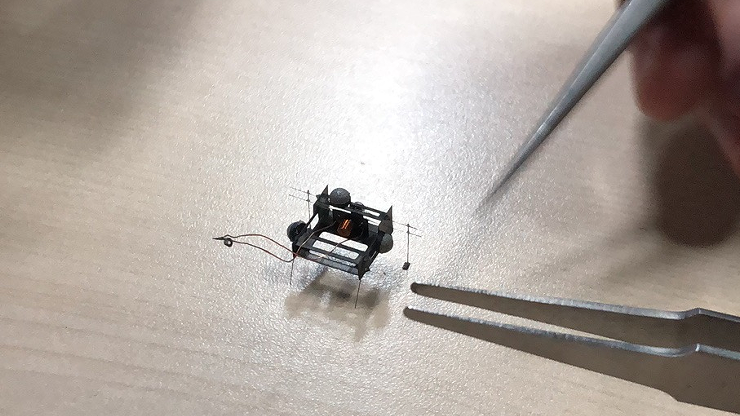
在极端情况下——通信中断,以人力对狭小空间开展探测极为困难,在自然灾害来袭时,更是危机重重,小型四足机器人便成为了极佳的选择。在小型四足机器人领域中,机器鼠体形小巧、机动灵活,是执行狭窄空间探测的理想机器人形态,能进入人无法到达的区域执行特殊任务,应用前景广阔。
北京理工大学智能机器人研究所副所长石青教授团队在研制仿生机器鼠的过程中,需要对机器鼠的动作姿态数据进行分析,从数据的角度分析机器人的稳定性,凌云光方案工程师搭建了2m x 2m的紧凑空间,采用9台PrimeX 13动捕相机精确的捕捉机器鼠的头部、背部、腿部、尾部等重要测试部位进行追踪,由于机器鼠的结构特殊,这些关键部位尺寸都极其细小,并且为了保障机器鼠的稳定姿态,负重也是极为关键的指标。为了在轻量化负重前提下精准获取关键部位的位置信息,凌云光提供了定制的3mm标记点,针对细小的结构精准获取机器鼠的运动姿态信息,优化机器鼠控制算法及结构,助力石青教授团队的SQuRo仿生机器鼠成功研制。